Solid Angle of an Orthogonally-Projected Surface Element
Hi!
Maybe you already bumped into the problem of projecting a cubemap into spherical harmonics and found this page to help you out: http://www.rorydriscoll.com/2012/01/15/cubemap-texel-solid-angle/ ?
But maybe you need the solution to another, similar problem that consists in finding the solid angle of a pixel lying in the z=0 plane and orthogonally projected onto the hemisphere, but couldn't find a page with that computation?
Well let me help you with that! 
First of all, the document that was used initially to do the computations -- whether it be in AMD's cube map generator, Rory Driscoll's summary or this page -- is the very interesting thesis by Manne Öhrström.
Cubemap Projection Configuration
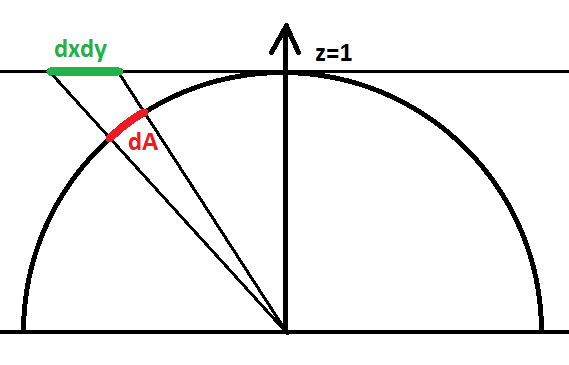
The configuration for a cube map is that pixels are lying on a plane z=1 such as \mathbf{p'}=(x,y,1), -1<x<1, -1<y<1 and we project back onto the unit hemisphere by normalizing the vector \mathbf{p}=\frac{\mathbf{p'}}{|\mathbf{p'}|}=\frac{(x,y,1)}{\sqrt{1+x^2+y^2}} as shown on figure 1 above.
The idea is to compute the area of a small element of surface on the hemisphere as we make it vary on the plane, we do that by computing the partial derivatives of \mathbf{p} along x and y that give us the vectors \frac{\partial \mathbf{p}}{\partial x} and \frac{\partial \mathbf{p}}{\partial y}.
It is well-known to graphics programmers that computing the cross product of these vectors gives us the normal to the sphere at position \mathbf{p}, and the length of that normal is the tiny area element dA on the hemisphere.
Integrating this operation (cross product and norm computation) over an interval [a,b]\in\mathbb{R}^2 yields:
It's easy to notice that A(1,1) = \frac{\pi}{6} which is the solid angle covered by a quarter of our cube map face, the solid angle of an entire face would be \frac{2\pi}{3} and all 6 faces of the cube map are then covering a proper solid angle of 4\pi and all is well!
Now, for our little problem...
Our Projection Configuration
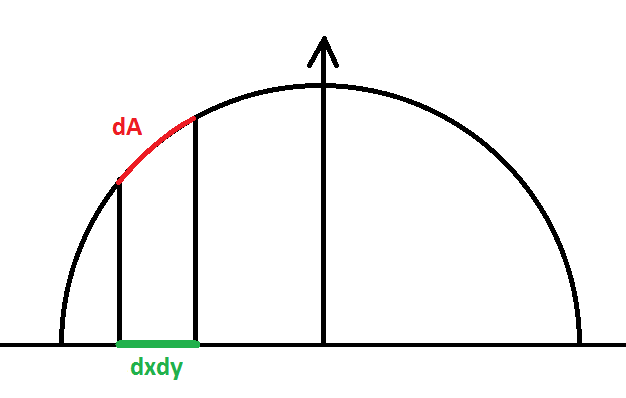
Our configuration is a little bit different as our points \mathbf{p'}(x,y) = (x,y,0) and we project onto the hemisphere to obtain \mathbf{p}(x,y) = (x,y,\sqrt{1-x^2-y^2}).
The partial derivatives along x and y give:
\frac{\partial \mathbf{p}}{\partial x} = \begin{pmatrix} 1 \\ 0 \\ -\frac{x}{\sqrt{1-x^2-y^2}} \end{pmatrix}
\frac{\partial \mathbf{p}}{\partial y} = \begin{pmatrix} 0 \\ 1 \\ -\frac{y}{\sqrt{1-x^2-y^2}} \end{pmatrix}
The cross product of these 2 vectors gives:
\frac{\partial \mathbf{p}}{\partial x} \times \frac{\partial \mathbf{p}}{\partial y} = \frac{1}{\sqrt{1-x^2-y^2}} \begin{pmatrix} x \\ y \\ \sqrt{1-x^2-y^2} \end{pmatrix}
And the norm is:
\left | \frac{\partial \mathbf{p}}{\partial x} \times \frac{\partial \mathbf{p}}{\partial y} \right | = \frac{1}{\sqrt{1-x^2-y^2}}
Which looks kinda nice! Integrating where it is definite (i.e. with x and y in the unit circle) \int_0^1\int_0^1 \frac{1}{\sqrt{1-x^2-y^2}} dx \, dy = \frac{\pi}{2} which is a quarter of the entire hemisphere's solid angle 2\pi, so we're good!
Except the primitive of this expression is a bit of nightmare after all, but this is our final result:
I tried to further out the simplification of the last 2 atan terms since a difference of atan gives a single atan but it turns out it shows some precision issues.
How to use this?
As explained by Driscoll, we compute the area of a single pixel by doing the exact same operation as with Summed Area Tables, that is we compute 4 values for the area of 4 sections like shown here:
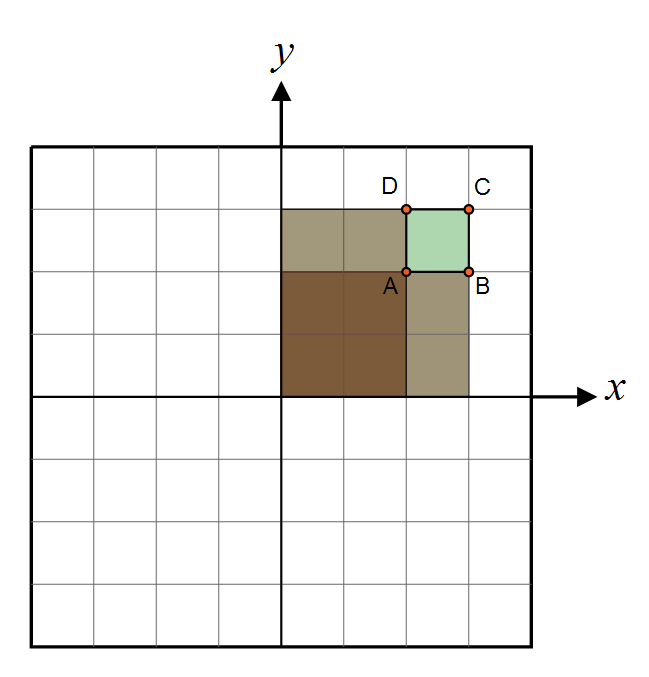
Then we get: dA(x,y) = C + A - D - B
Note
-
Obviously, you have to be very careful not to use eq. (2) outside of its region of definition x^2+y^2 < 1
-
Trying to compute the hemisphere's area using eq. (2) turns out to be converging '''super slowly''': even with a quarter disc split into 10000x10000 pixels, I can only reach 1.5535995614989679...
Here is the C# code to compute the solid angle of a pixel of coordinates (X, Y) in an image of size (Width, Height):
double ComputeSolidAngle( uint _X, uint _Y, uint _width, uint _height ) { double x0 = 2.0 * _X / _width - 1.0; double y0 = 2.0 * _Y / _height - 1.0; double x1 = 2.0 * (_X+1) / _width - 1.0; double y1 = 2.0 * (_Y+1) / _height - 1.0; double A0, A1, A2, A3; if ( !ComputeArea( x0, y0, out A0 ) ) return 0.0; if ( !ComputeArea( x1, y0, out A1 ) ) return 0.0; if ( !ComputeArea( x0, y1, out A2 ) ) return 0.0; if ( !ComputeArea( x1, y1, out A3 ) ) return 0.0; double dA = A3 - A1 - A2 + A0; return Math.Max( 0.0, dA ); } // y ArcTan[x/Sqrt[1 - x^2 - y^2]] + x ArcTan[y/Sqrt[1 - x^2 - y^2]] + 1/2 (ArcTan[(1 - x - y^2)/(y Sqrt[1 - x^2 - y^2])] - ArcTan[(1 + x - y^2)/(y Sqrt[1 - x^2 - y^2])]) bool ComputeArea( double x, double y, out double _area ) { double sqRadius = x*x + y*y; if ( sqRadius > 1.0 ) { // Outside unit circle _area = 0.0; return false; } double rcpCosTheta = 1.0 / Math.Sqrt( 1.0 - sqRadius ); if ( double.IsInfinity( rcpCosTheta ) ) { if ( x == 0.0 ) x = 1e-12; if ( y == 0.0 ) y = 1e-12; } _area = y * Math.Atan( x * rcpCosTheta ) + x * Math.Atan( y * rcpCosTheta ) + 0.5 * (Math.Atan( (1 - x - y*y) * rcpCosTheta / y ) - Math.Atan( (1 + x - y*y) * rcpCosTheta / y )); return true; }
Example
Say you have the normalized expression of a Normal Distribution Function D(x,y) defined in an image of the flattened hemisphere:
And you want to compute the shadowing/masking term as given by Dupuy et al in "Extracting Microfacet-based BRDF Parameters from Arbitrary Materials with Power Iterations" eq. 3:
G(\mathbf{k}) = \frac{cos \theta_k}{\int_{\Omega_+}{\mathbf{k}\mathbf{h} \, D(\mathbf{h}}) \, d\omega_h}
All you have to do is to write a convolution for each pixel of the image with a code similar to this:
// Perform an integration with the NDF weighted by the cosine of the angle with that particular direction float3 k = given; float3 h; float convolution = 0.0; for ( uint Y=0; Y < Height; Y++ ) { h.y = 2.0f * Y / Height - 1.0f; for ( uint X=0; X < Width; X++ ) { h.x = 2.0f * X / Width - 1.0f; float sqSinTheta = h.x*h.x + h.y*h.y; if ( sqSinTheta >= 1.0f ) continue; h.z = sqrt( 1.0f - sqSinTheta ); float k_o_h = k.Dot( h ); // k.h float D = NDF[X,Y].x; // D(h) float dW = ComputeArea( X, Y ); // dW convolution += k_o_h * D * dW; } } float G = k.z / convolution;
This yields the G term as an image that I'm showing here with a strong contrast applied, otherwise it's mostly white:
